
- 采用模块化软件和硬件解决方案,便于在工业移动机器人中进行集成
- 开放式标准和接口提供极高的自由度
- 减少开发工作量,加快面市速度
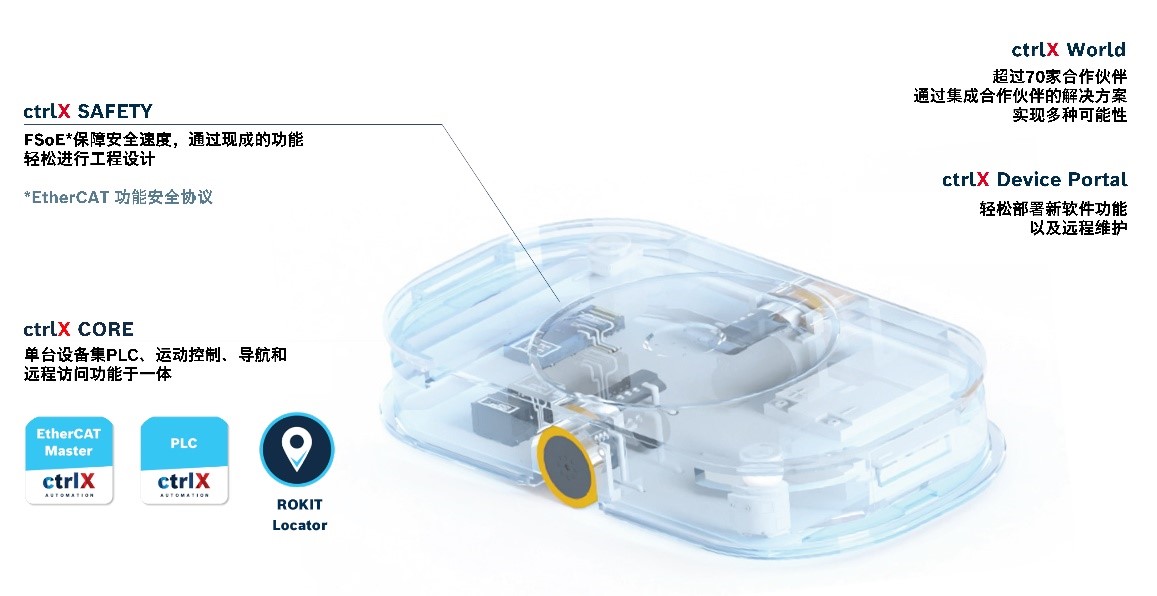
图1:博世力士乐的机器人套件ROKIT和自动化套件ctrlX AUTOMATION可简化并加速自动导引车辆的开发和调试。(图片来源:博世力士乐)
在移动机器人自动化方面,博世力士乐正持续向模块化的软件和硬件解决方案探索。如此可使制造商和系统集成商在单个车辆的功能扩展、车队和设备集中管理等不同层级上拥有最大的自由度。他们可以根据自己的需求将必要的机器人和自动化组件进行灵活组合,从而受益于极小的集成工作量。
运输和物流是自动导引车辆和自主移动机器人最常见的两个应用领域,而这些领域目前正处于快速增长阶段。在此背景下,传统企业和初创公司在新概念产品的研究方面都投入巨大的热情。博世力士乐利用机器人套件ROKIT和自动化套件ctrlX AUTOMATION为制造商和系统集成商提供具有高度灵活性的模块化解决方案,使他们能够将各自的专业知识付诸实践并实现快速发展,从而在竞争中脱颖而出。
无需专业知识即可轻松实现自动化
模块化套件ROKIT由软件和硬件组件构成,为多种车辆架构的自主化提供便利。作为一种开放式系统解决方案,其模块可无缝集成到更高层级的控制系统中,并与成熟的工业PC、操作系统和激光雷达相兼容。定位软件ROKIT Locator可实时确定车辆位置并自动生成周围环境地图,而无需任何结构改动措施。
ROKIT产品的控制和联结可通过开放式用户接口(API)完成。图形用户界面aXessor现已成为ROKIT产品包的一个默认组件且功能完备。该中央管理界面具有直观的显示,是一种适用于快捷工程设计以及调试、操作和车辆维护的快速、透明的手段。所有这些均可在不具备任何专业知识的情况下得以实现。激光定位软件ROKIT Locator可实时确定车辆位置并自动生成周围环境地图,而无需任何结构改动措施。使用工业以太网总线FailSafe over EtherCAT(FSoE)通信方式的安全功能可减少所需布线量,并确保移动机器人具备必要的安全性。
全部任务采用同一套控制系统
控制平台ctrlX CORE可将过去分布于PC、PLC和安全控件上的全部任务加以组合,从而减少开发人员所用组件数量,缩小必需的安装空间。同时,由于功能集成和现代通信接口的采用,所需布线量有所下降。自动化套件ctrlX AUTOMATION完全基于开放式标准,如EtherCAT、OPC UA、MQTT或VDA 5050。ctrlX Data Layer可确保在流程与安全功能之间进行快速无误的数据交换。所有安全信息交换均通过FSoE连接来实现。因此,制造商可以在工作量最小的前提下获得对应于PLd等级性能的功能安全性。博世力士乐的ctrlX SAFETY为此提供了必要的接口和模块。除标准功能外还可执行安全算术运算。
附加机械手等适用于AMR的机器人任务是通过集成运动控制来实现。额外连接的传感器和执行器可对其他功能进行集成,例如卷帘自动开启或与其他外围单元进行通信。
通过中央设备管理进行更新
ctrlX CORE是以Linux操作系统和应用程序技术为基础。开发人员可从博世力士乐的众多应用程序中进行选择、利用第三方应用程序或创建自有应用程序。即使在交付之后,也可以快速、简便地进行更新或安装其他应用程序。为此目的,ctrlX AUTOMATION可通过ctrlX 设备门户对中央车队管理提供支持,从而实现对车队所有车辆的远程管理。
开发人员可将机器人套件ROKIT和自动化套件ctrlX AUTOMATION的各种组件逐步进行概念集成。工程工具与组件的一致模块性和开放性相结合,可大幅减少自动导引车辆系统和自主移动机器人的开发工作量,从而加快面市速度。

